Motor Drives Showdown – GaN vs. Silicon
GaN Talk – Marco Palma
Sep 14, 2021
This GaN Talk blog discusses the advantages of using GaN-based inverters instead of silicon-based inverters for motor drive designs to operate smoother while reducing size and weight. These advantages are critical for motor drives used in typical applications such as warehousing & logistical robots, servo drives, e-bikes & e-scooters, collaborative and low voltage robots and medical robotics, industrial drones, and automotive motors.
Omdia forecasts that worldwide shipments of warehousing and logistics robots will grow rapidly over the next 5 years from 194,000 units in 2018 to 938,000 units annually by 2022, with the rate of growth slowing after 2021 as many major players will have adopted robotic systems by then. Worldwide revenue for this category will increase from $8.3 billion in 2018 to $30.8 billion in 2022, providing significant opportunities for established participants and emerging players.
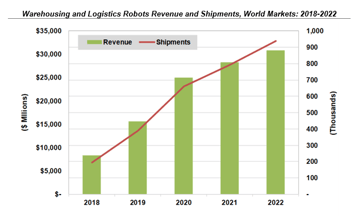 (Image courtesy of Omdia)
(Image courtesy of Omdia)
GaN Advantages
GaN FETs and ICs switch faster and smoother and have zero reverse recovery compared to equivalently specified silicon MOSFETs. This faster and better switching allows operation at higher switching frequencies in inverter designs to eliminate electrolytic capacitors. Further, GaN can operate at a minimal dead time, which increases the effective torque per ampere obtained from the motor, thus making the motor more efficient. In addition, GaN allows for the integration of the inverter with the motor resulting in an overall reduction in size and weight of the system. Table 1 shows a comparison of EPC GaN FETs vs. MOSFETs with similar RDS(on) ratings.
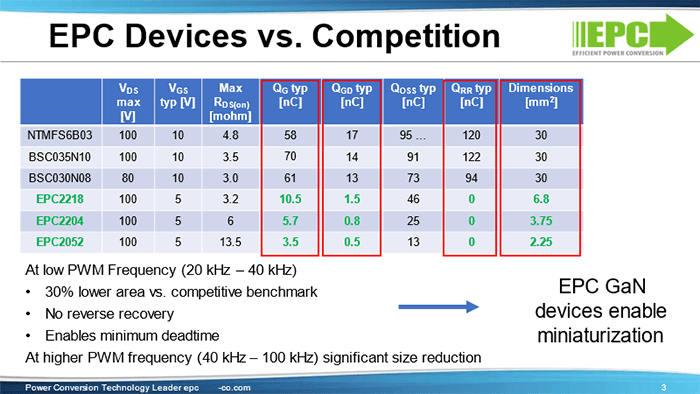 Table 1:Key parameter comparision of EPC GaN FETs vs. MOSFETs
Table 1:Key parameter comparision of EPC GaN FETs vs. MOSFETs
In a typical motor design, the PWM frequency is between 20 and 40 kHz, with dead times between 100 ns and 500 ns. The input cables can be at least 10 to 20 cm long and become a source of EMI, conducted or radiated. Therefore, in traditional motor drive designs, it is common to add an input EMI LC filter. We will show that this can be eliminated in GaN-based motor drive designs.
Capacitor Selection
When comparing electrolytic with ceramic capacitors, remember that RMS current in the capacitor does not depend on PWM frequency, while the voltage ripple is inversely proportional to PWM frequency and capacitance. Therefore, electrolytic capacitors are sized with RMS current. They are oversized, and their value does not change with PWM frequency. Ceramic caps are sized with voltage ripple and are sized in line with the minimum required capacitance. Their value and size decrease with increasing PWM frequency. 100 kHz operation is a sweet spot for ceramic capacitors ESR. This demonstrates a clear advantage of ceramic capacitors in terms of occupied volume reliability, cost, and EMI.
Dead-Time Effect
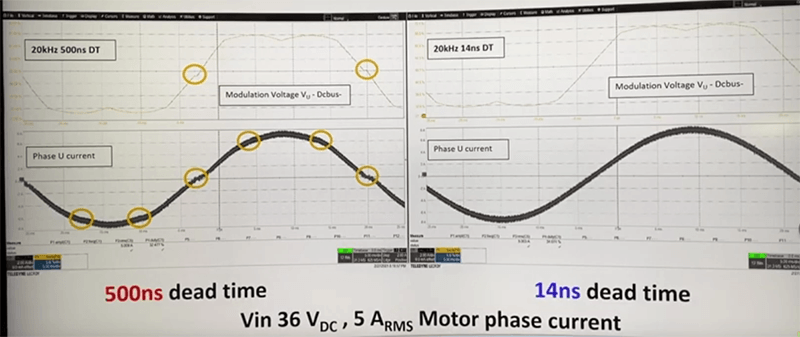
On the left side of Figure 1, the effect of 500 ns dead time on a motor operated at 20 kHz PWM is shown. There are six discontinuities in the current, circled in orange. These discontinuities are responsible for the 6th harmonic in the torque. It is an even harmonic, so it produces only vibration.
On the right side of Figure 1, it is shown that by reducing the dead time to 14 ns, the discontinuities disappear, as does the 6th harmonic.
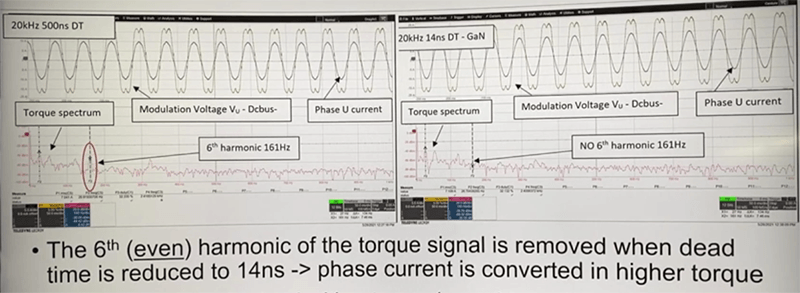
In Figure 2, the torque signal is obtained with a torque/speed transducer and analyzed with FFT. The 6th (even) harmonic of the torque signal that is present on the left when the dead time is 500 ns is completely absent when dead time is reduced to 14 ns in the setup on the right.
In the EPC Italy Motor Drive lab, an experiment was run to further evaluate these differences. Two systems, both at 36 VDS, 5 ARMS, and 400 RPM, are compared. Setup 1 uses 2 x 330 µF electrolytic capacitors and 1 x 2.7 µH input inductors, running at 20 kHz with 500 ns dead time, typical of a traditional silicon MOSFET-based motor drive. Setup 2 operates at 100 kHz, 14 ns dead time, and uses 2 x 22 µF ceramic capacitors and no input inductor, which is something only achievable with GaN.
Table 2 is a summary of the overall impact of the two setups. By running at 100 kHz, the GaN inverter allows the usage of ceramic capacitors in place of bulky electrolytic capacitors. By reducing the dead time it is possible to get more torque per ampere, making the motor more efficient and thus making the overall system more efficient. The higher frequency setup increases the overall system efficiency from 65.3% to 71.8%.
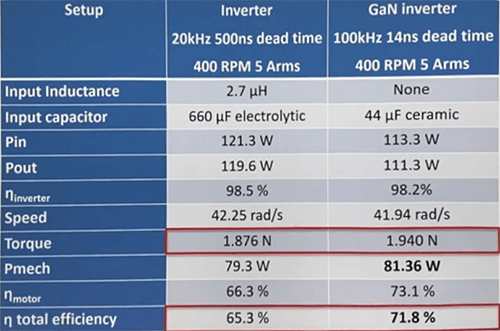 Table 2: Summary of two motor drive setups
Table 2: Summary of two motor drive setups
Conclusion
The faster and better switching performance of GaN FETs and ICs allows inverter operation at higher switching frequencies to eliminate electrolytic capacitors. Further, GaN can operate at a minimal dead time. This reduction in dead time increases the effective torque per ampere obtained from the motor, making the motor more efficient and allowing for the integration of the inverter with the motor, further reducing overall system size and weight. These advantages are critical for the motor drives used in eMobility solutions, robotics, and drones.
To see a video of this design experiment, watch the video on the EPC YouTube channel and become a subscriber to stay informed of all the latest GaN design and application videos.