深入关节内部:GaN 集成电路如何实现超紧凑的人形机器人电机驱动器
技术分享GaN技术杂谈 – Federico Unnia
8月 05, 2025
人形机器人的未来依赖于紧凑、高效且可靠的运动控制。每一克重量、每一毫米空间、每一毫瓦功耗都至关重要。这就是 EPC 开发 EPC91118 的原因:一个专为集成在人形机器人关节内部设计的三相无刷直流电机驱动参考设计——采用单芯片 GaN 集成电路,实现无与伦比的功率密度与开关性能。
为什么是人形机器人?
人形机器人正从研究实验室走向商业化应用。它们类似人类的外形使其能在为人类设计的环境中自然地互动——仓库、工厂、办公室,甚至家庭——非常适合执行需要灵巧性、移动性和人机交互的任务。
推动发展的关键应用场景:
- 物流与仓储自动化:步行机器人可以在轮式自动导引车(AGV)无法通过的楼梯或崎岖地形中搬运货物。
- 客户服务与酒店业:语音控制的人形机器人可用于前台接待、导览服务或零售结账。
- 医疗支持:协助病人移动、监测,甚至提供陪伴。
- 灾难应对:在人类难以进入的危险或倒塌区域中导航执行任务。
为了在这些场景中有效运作,人形机器人需要精确、响应快速且结构紧凑的电机控制系统——尤其是在关节处。电机必须轻巧、高扭矩,且易于集成于有限的体积中。这使得像 EPC91118 这样的基于 GaN 的逆变器成为关键技术。
EPC91118:集成于 32 毫米电路板上的完整运动控制系统
EPC91118 的核心是 EPC23104 ePower™ Stage 集成电路——一个 100 V GaN 单芯片器件,集成了栅极驱动器与电平转换电路。三个这样的 IC 组成一个高效三相逆变器,可提供:
- 每相最高 15 ARMS 脉冲电流(持续 10 ARMS)
- 100 kHz PWM 频率,死区时间为 50 ns
- 15–55 V 输入电压范围
EPC91118 将所有关键的电机控制功能集成在一块可安装于 32 毫米直径关节壳体内的圆形 PCB 上:
- 转子轴磁编码器,具有 1024 脉冲分辨率,并支持 SPI 接口
- 电流感测:两相使用 44 mV/A 霍尔效应传感器,并具有过流检测功能
- 电压感测:增益为 44.89 mV/V
- STM32G431 微控制器
- RS485 通讯接口
- 5 V 和 3.3 V 电源轨
- 全陶瓷电容 DC 链路(无电解电容)
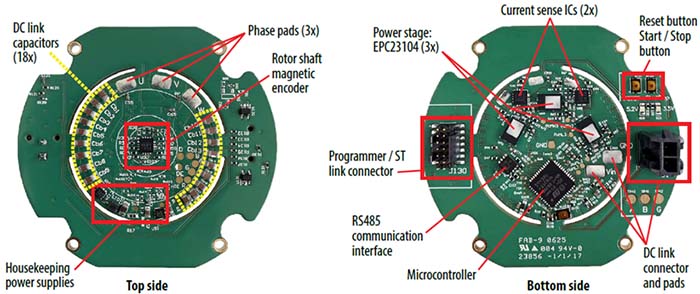 图 1:EPC91118 的顶部与底部视图
图 1:EPC91118 的顶部与底部视图
为什么 GaN 集成电路对机器人很重要
传统的硅 MOSFET 机器人关节逆变器需要较大的开关死区时间、笨重的电解电容以及离散驱动电路。这限制了系统的小型化,尤其是在膝盖、手腕或脚踝等紧凑机械空间内放置电子元件时。
EPC91118 解决了这些问题:
- GaN 单芯片集成降低元件数量、优化布局并缩小尺寸
- 高开关频率(100 kHz)允许使用陶瓷电容代替电解电容,减薄电路板
- 低 RDS(on)(典型值 8.7 mΩ)与快速开关降低损耗,提高散热能力与单位功率扭矩
与等效的硅解决方案相比,EPC91118 实现了:
- 逆变器面积减小 66%
- 完全无电解电容
- 更高的电机控制带宽
专为人形机器人(和无人机)设计
该参考设计针对人形机器人关节与小型无人机推进系统中的电机进行了优化,在这些应用中,紧凑、轻便且可靠的电力电子系统至关重要。其结构与布局专为集成于人形机器人而设计,并具备可适配的安装方式,适用于类似平台。
RS485 接口确保兼容常见的机器人通讯总线,而JTAG 接口则支持实时固件调试与基于图形界面的电机控制设置。
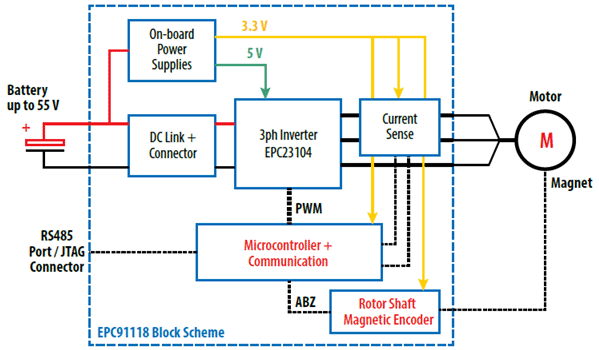 图 2:EPC91118 评估板的方框图概览
图 2:EPC91118 评估板的方框图概览
评估与快速上手
EPC91118 出厂时已预设为以 50 rpm 驱动典型关节电机,固件可通过 JTAG 或 RS485 轻松重新配置。系统级效率测试显示其在不同速度与扭矩下均表现出色,验证了其在动态机器人环境中的适用性。
作为实验评估,EPC91118 板卡在动测平台上进行了测试,涵盖不同的负载扭矩与转子转速条件。逆变器运行在 100 kHz PWM、50 ns 死区时间下。
下图展示了从直流输入电能到机械输出功率的系统总效率,测试范围涵盖 50 rpm 到 150 rpm 的转子速度。系统效率包含逆变器与电机的整体效率。
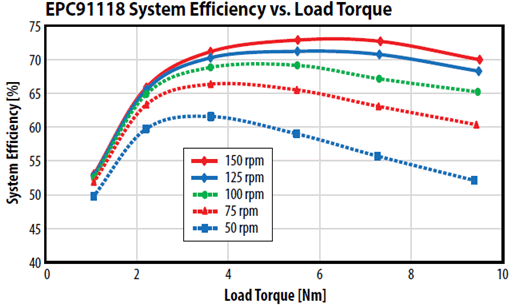 图 3:不同转子速度下的系统效率与负载扭矩关系
图 3:不同转子速度下的系统效率与负载扭矩关系
结论
EPC91118 不只是一个电机驱动器——它是一个用于嵌入式运动控制的平台,在尺寸、效率与集成度最关键的场合大显身手。借助 GaN 技术,它为机器人设计者提供了突破机电一体化与移动能力极限的工具,服务于下一代人形机器人与自主机器。
技术支持与资源
Tags: