モーター駆動の対決:GaN対シリコン
GaNの話 – Marco Palma
9 14, 2021
このGaNの話のブログではモーター駆動回路の設計に、シリコン・ベースのインバータの代わりにGaNベースのインバータを使うと、大きさと重さを削減できると同時に、スムーズに動作させられることの利点について説明しています。これらの利点は、倉庫や物流のロボット、サーボ駆動、電動自転車や電動キックボード、協調型で低電圧のロボットや医療用ロボット、産業用ドローン、自動車用モーターなど、一般的なアプリケーションで使われるモーター駆動回路にとって重要です。
英調査会社Omdiaは、倉庫や物流のロボットの世界的な出荷台数は、2018年の年間19万4000台から、2022年には93万8000台へと、今後5年間で急速に増加すると予測しています。2021年までに、多くの主要プレーヤがロボット・システムを採用するため、その後の成長率は鈍化します。この分野の世界的な売り上げは、2018年の83億米ドルから、2022年には308億ドルに増加し、既存のプレーヤと新興プレーヤに大きな機会を提供します。
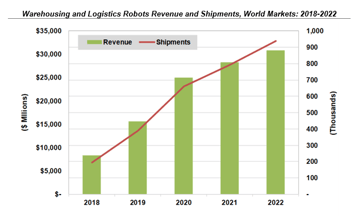 (出典:英調査会社Omdia)
(出典:英調査会社Omdia)
GaNの利点
GaN FETとICは、同等の仕様のシリコンMOSFETと比べて、より高速、かつスムーズに切り替わり、逆回復がゼロです。より高速で優れたスイッチング能力によって、インバータ設計で、より高いスイッチング周波数での動作が可能になり、電解コンデンサが不要になります。さらに、GaNは、最小のデッドタイムで動作できるため、モーターから得られる1 A当たりの実効トルクが増加し、モーターの効率が向上します。さらに、GaNは、インバータとモーターの統合を可能にし、システムのサイズと重さを全体的に削減できます。表1は、EPCのGaN FETと、同様の定格オン抵抗RDS(on)のMOSFETの比較です。
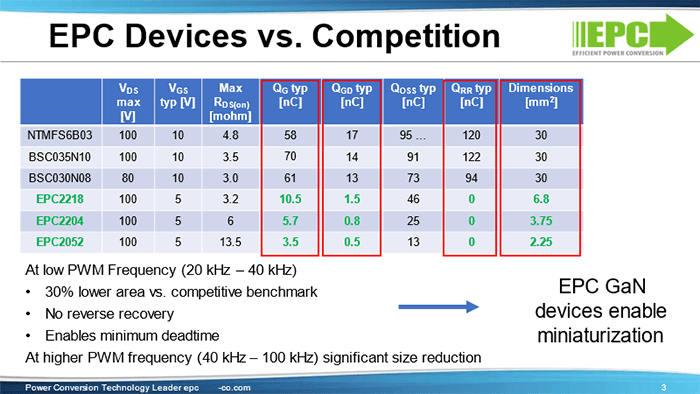 表1:EPCのGaN FETとMOSFETの主要なパラメータの比較
表1:EPCのGaN FETとMOSFETの主要なパラメータの比較
一般的なモーター設計では、PWM(パルス幅変調)周波数は20〜40 kHzで、デッドタイムは100 ns〜500 nsです。入力ケーブルの長さは少なくとも10〜20 cmで、伝導または放射されるEMI(電磁干渉)雑音の発生源になります。したがって、従来のモーター駆動回路の設計では、入力のEMI(電磁干渉)雑音用LCフィルタを追加することが一般的です。ここでは、GaNベースのモーター駆動回路の設計で排除できることを示します。
コンデンサの選択
電解コンデンサとセラミック・コンデンサを比較する場合、コンデンサのRMS(実効値)電流はPWM周波数に依存しないことに対し、電圧リップルはPWM周波数と容量値に反比例することに注意してください。したがって、電解コンデンサは、RMS電流に対応したサイズになっています。それらは特大であり、それらの値はPWM周波数によって変わりません。セラミック・コンデンサは、電圧リップルでサイズが設定されており、必要な最小容量値に合わせたサイズになっています。それらの値とサイズは、PWM周波数の増加と共に減少します。100 kHzの動作は、セラミック・コンデンサのESR(等価直列抵抗)のスイート・スポットです。これは、占有体積の信頼性、コスト、EMI雑音の点でセラミック・コンデンサの明らかな利点を示しています。
デッドタイムの効果
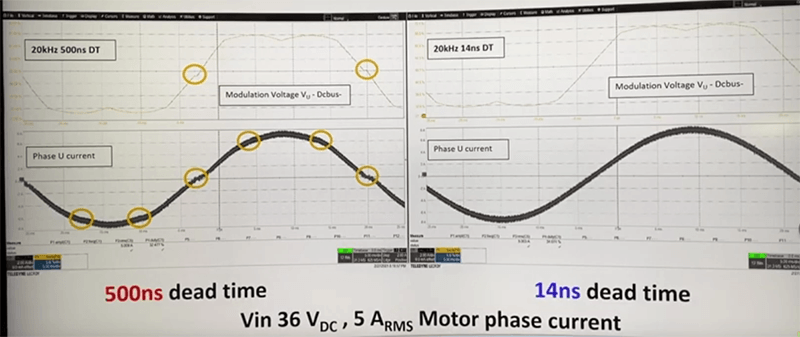
図1の左側は、20 kHzのPWMで動作するモーターに対する500 nsのデッドタイムの影響です。オレンジ色の丸で囲まれた6つの電流の不連続性があります。これらの不連続性は、トルクの6次高調波の原因になります。偶数次の高調波なので、振動のみを発生します。
図1の右側では、デッドタイムを14 nsに短くすることで、6次高調波と同様に不連続性がなくなることが示されています。
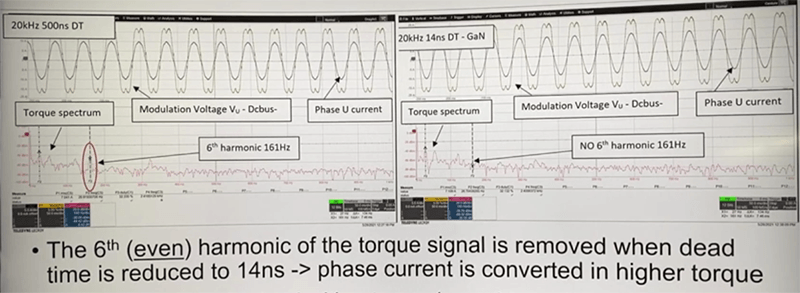
図2では、トルク信号はトルク/速度の変換器から得られ、FFTと共に分析されます。デッドタイムが500 nsのときに、左側に示すトルク信号の6次(偶数)高調波は、右側の設定で、デッドタイムを14 nsへと短くすると、完全になくなります。
イタリアにあるEPCのモーター・ドライブ・ラボでは、これらの違いをさらに評価するための実験を行いました。いずれも36 VDS、5 ARMS、400 RPMに設定して、2つのシステムを比較します。設定1は、2×330 µFの電解コンデンサと1×2.7 µHの入力コイルを使って、従来のシリコンMOSFETベースのモーター駆動回路の一般的なデッドタイム500 nsであり、20 kHzで動作させます。設定2は、100 kHz、デッドタイム14 nsで動作させ、2×22 µFのセラミック・コンデンサを使い、入力コイルは使っていません。これは、GaNでのみ実現可能になります。
表2は、2つの設定の全体的な影響の要約です。GaNインバータは100 kHzで動作するため、かさばる電解コンデンサの代わりに、セラミック・コンデンサを使えます。デッドタイムを短縮することによって、1 A当たりのトルクを増やすことができ、モーターの効率が向上し、システム全体の効率が改善されます。より高い周波数設定によって、システム全体の効率が65.3%から71.8%に向上します。
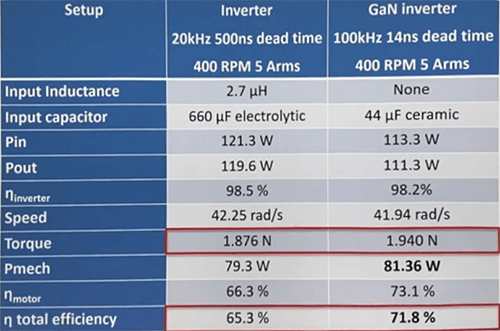 表2:モーター駆動回路の2つの設定の要約
表2:モーター駆動回路の2つの設定の要約
結論
GaN FETとICのより高速で優れたスイッチング特性によって、より高いスイッチング周波数でのインバータ動作が可能になり、電解コンデンサが不要になります。さらに、GaNは最小限のデッドタイムで動作できます。このデッドタイムの短縮によって、モーターから得られる1 A当たりの有効トルクが増加し、モーターがより高効率になり、インバータとモーターの統合が可能になり、システム全体のサイズと重さが一段と削減できます。これらの利点は、イーモビリティ・ソリューション、ロボット、ドローンで使われるモーター駆動回路にとって重要です。
この設計実験のビデオを見るにはEPCのYouTubeチャネルでビデオを視聴し、サブスクライバになって、最新のGaN設計やアプリケーションのビデオをすべて入手してください。