人型ロボットの関節向けに最適化した小型3相GaNインバータ基板
GaNの話 – Federico Unnia
11 20, 2025
ロボットの新時代を支える組み込みパワー
人型ロボットが人間の動きを精密かつ機敏に再現するようになるにつれて、技術者は小型で高効率、かつ応答性に優れたモーター駆動装置への需要の高まりに直面しています。リファレンス・デザインのEPC91120は、GaN集積化によってインバータ回路をロボットの関節に直接組み込むことで、軽量化、効率向上、そして動作制御の強化を実現する方法を示しています。
設計の概要:32 mmのインバータの高電力密度
EPC91120は、3相BLDCモーター駆動用インバータで、5.2 mΩのオン抵抗RDS(on)で耐圧100 VのモノリシックGaNハーフブリッジ・デバイスであるEPC23102 ePower™ Stage ICを3個搭載しています。このインバータは、15 V~65 Vの直流電圧で動作し、最大ピーク電流21 A(定常状態で15 ARMS)およびピーク・パルス電流42 A(パルスで30 ARMS)を供給できます。回路ブロック図が図1です。
完全に統合された制御段には以下が含まれます:
- マイクロコントローラ(STM32G431CBU6)(JTAGプログラミングとRS485通信機能を搭載)
- ハウスキーピング電源搭載(5 Vと3.3 V)
- 高精度制御のための電流と電圧の検出回路
- ローター位置フィードバック用のSPIインタフェースを備えた1024パルス磁気エンコーダ
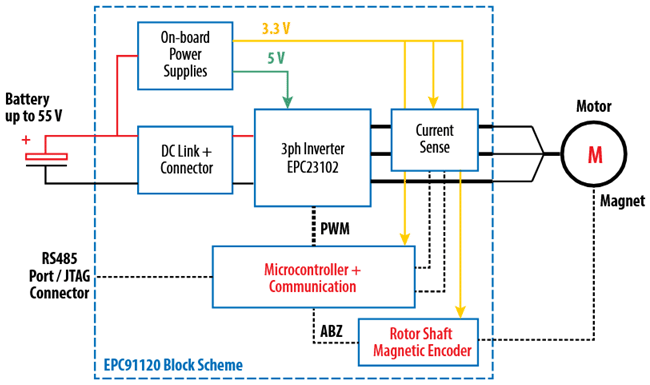 図1:評価基板EPC91120の回路ブロック図の概要
図1:評価基板EPC91120の回路ブロック図の概要
機械的統合:ロボットの関節向けに設計
EPC91120は、直径32 mmの円内に完全に収めてあり、Unitree A1モーターなどの人型ロボットの関節に統合するために、55 mmの機械フレーム内に取り付けられています(図2参照)。
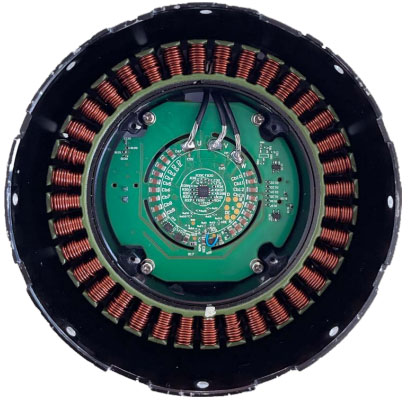 図2:ロボットのモーター内に搭載したEPC91120
図2:ロボットのモーター内に搭載したEPC91120
この形状によって、インバータをステータ・ハウジング内に直接配置することができ、モーターの筐体をヒートシンクとして使って熱特性を向上させることができます。
この基板は、100 kHzのPWM(パルス幅変調)周波数で動作し、デッドタイムはわずか50 nsです。これによりスムーズなトルク制御と音響雑音の低減を実現し、人型ロボットの手足やその他の精密モーションシステムに最適です。
性能の検証:効率性と俊敏性の融合
熱特性
直流48 V、100 kHz PWMでテストしたところ、EPC91120は次の特性を維持しました:
- 自然対流(ヒートシンクなし)の場合、1相当たり7 ARMS
- モーターの筐体がヒートシンクとして機能する場合、1相当たり15 ARMS
筐体から周囲までの温度上昇は40 °C以下に抑えられ、小型な関節への統合における優れた熱特性が確認されています。
パルス・トルク効率
直流24 V、100 kHz PWMで実施した動的負荷テストでは、次のことが実証されました:
- 直流入力から機械出力までのシステム効率は80%以上
- ローター回転速度92 rpmで最大トルク26.5 N·m
- トルク・インパルス時のピーク電流は30 ARMS
これらの結果は、この設計が人型ロボットの関節や軽量ロボットの手足のための信頼性の高い高性能インバータ・ソリューションであることを検証しています。
人型ロボット以外の用途
EPC91120のアーキテクチャは人型ロボットの関節向けに最適化されていますが、次のような用途にも適しています:
- UAV(無人航空機)推進システム
- 協働ロボット(コボット)のアクチュエータ
- 高トルク外骨格
- 自動化向け小型サーボ駆動
GaNの高い効率性と小さな実装面積によって、1グラムや1ミリワットでも重要になる次世代の設計が可能になります。
技術サポートと資料
- GaNのエキスパートに聞く
あなたの次のモーター駆動へのGaNの統合でお困りですか? 当社のエキスパートたちがお手伝いいたします。
GaNのエキスパートに聞く
- Right the First Timeから導入
レイアウトのヒント、設計チェックリスト、トラブルシューティングガイドについては、GaN First Time Rightのページをご覧ください。
GaN First Time Rightへ
- EPC91120のクイック・スタート・ガイドをダウンロード
回路図、レイアウト・ファイル、性能ベンチマークにアクセスできます。
EPC91120関連資料を見る