利用GaN的力量驅動馬達 – 伺服驅動、機器人、無人機
技術分享雜談GaN技術 – Renee Yawger
九月 12, 2019
隨著馬達技術的進步,功率密度增加;馬達被製成更小的形式,設計速度更高,精度更高,這需要更高的電氣頻率。
三相無刷直流馬達 (BLDC) 具有其功率等級的小巧性,可以精確控制,提供高電機效率,並且在適當控制下可以最小化振動。這些馬達在伺服驅動、機器人(如外科機器人)和無人機(如四軸飛行器)等精密應用中越來越多地使用或完全使用。為了將電流漣波控制在合理範圍內,這些馬達—由於其低電感—需要高達 100kHz 的切換頻率。需要能夠高效運行在高頻的場效應電晶體(FET)來最小化損耗並抵消馬達中的扭矩漣波,這會產生振動、降低驅動精度並減少效率。
氮化鎵 (GaN) 高電子遷移率電晶體(HEMT)可以比硅 MOSFET 更快地切換,顯著減少切換損耗。GaN 電晶體的另一個優點是沒有反向恢復電荷,這會導致傳統硅 MOSFET 設計中的切換節點振鈴(1)。
一個 GaN FET 功率級裝置,如 LMG5200,是一個 80 V GaN 半橋功率模塊。該裝置將驅動器和兩個 80 V GaN FET 集成在一個 6 mm x 8 mm 的 QFN 封裝中,優化了極低的門迴路和功率迴路阻抗(2)。輸入是 5 V TTL 和 3.3 V CMOS 邏輯兼容的,具有典型的傳播延遲不匹配 2 ns。這使得非常短的死區時間成為可能,從而減少損耗和輸出電流失真。LMG5200 通過提供一個易於佈局和組裝到最終產品中的用戶友好封裝,延伸了離散 GaN FET 的優勢。
對於馬達驅動應用,德州儀器提供了一個使用三個 LMG5200 半橋 GaN 功率模塊的 48 V/10 A 高頻 PWM 三相 GaN 逆變器參考設計。圖 1 顯示了該參考設計的方塊圖。
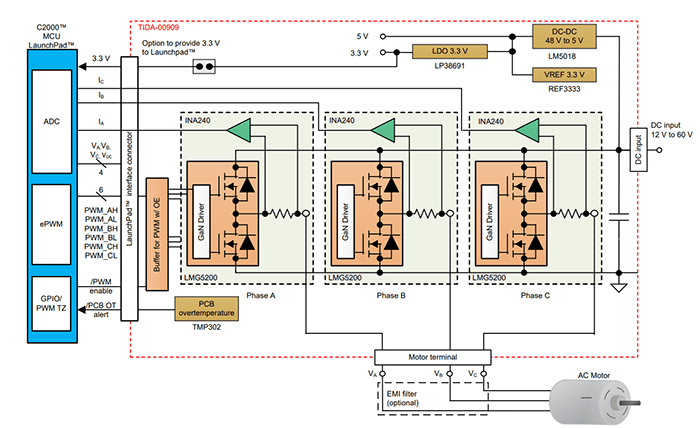 圖 1:參考設計方塊圖
圖 1:參考設計方塊圖
氮化鎵 (GaN) 電晶體可以比硅 FET 更快地切換,將 GaN FET 和驅動器集成在同一封裝中減少了寄生電感並優化了切換性能,減少損耗,從而允許縮小或完全消除散熱片的需求。
在 27 ֯C 實驗室溫度下,使用 Tektronix PA4000 功率分析儀對該參考設計進行了效率測試。參考設計板由 48-V DC 供電,並使用 Teknic 低壓伺服馬達作為負載。在 7 ARMS 最大負載電流下,參考設計板在 40 kHz PWM 下的板電力損耗為 4.95 W,在 100 kHz PWM 下為 5.65 W。圖 2 顯示了功率損耗隨輸出電流的變化。
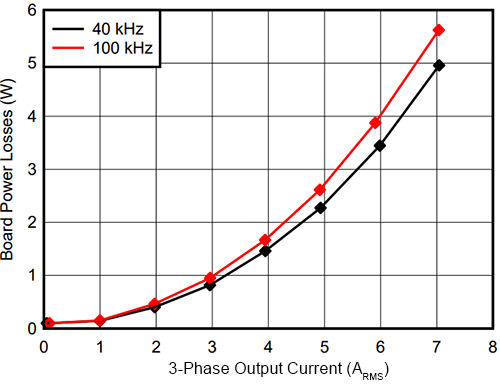 圖 2:48 V 下的功率損耗與三相 RMS 輸出電流的關係
圖 2:48 V 下的功率損耗與三相 RMS 輸出電流的關係
在 40 kHz PWM 驅動 Teknic 伺服馬達時,該參考設計的輸出功率為 83 W 的效率為 94.3%,在 100 kHz PWM 下為 93.6%。從 48 V 線路達到的理論最大效率是在全功率 400 W 時。這在 7 ARMS 相電流下給出了相間電壓 34 VRMS(空間矢量 PWM),並在 100 kHz 下達到 98.5% 的逆變器效率(3)。
BLDC 馬達是外科機器人和無人機等應用的最佳選擇,因其小型化的功率比。GaN FET 和 IC 是正弦調制馬達驅動的理想設備,因其更高的效率和更高的操作頻率。在馬達控制電路中使用 GaN 裝置可提高精度並使馬達驅動更緊湊。這種組合使設計師能夠創建比等效 MOSFET 解決方案更緊湊且具有更高靈活性的系統。像 LMG5200 這樣的 GaN 功率級延伸了離散 GaN FET 的優勢,提供了一個易於佈局和組裝到最終產品中的用戶友好封裝。