Inside the Joint: How GaN ICs Enable Ultra-Compact Motor Drives for Humanoid Robots
GaN Talk – Federico Unnia
Aug 05, 2025
The future of humanoid robotics depends on compact, efficient, and reliable motion control. Every gram, every millimeter, and every milliwatt matters. That’s why EPC developed the EPC91118: a 3-phase BLDC motor drive reference design specifically shaped for integration inside humanoid robot joints—featuring monolithic GaN ICs that deliver unmatched power density and switching performance.
Why Humanoid Robots?
Humanoid robots are moving from research labs into commercial deployment. Their human-like form factor enables them to interact naturally in environments built for people—warehouses, factories, offices, and even homes—making them ideal for tasks involving dexterity, mobility, and human-machine interaction.
Key Use Cases Driving Development:
- Logistics & Warehouse Automation: Walking robots can carry and move goods across uneven terrain or stairs where wheeled AGVs fail.
- Customer Service & Hospitality: Voice-enabled humanoids can assist in front-desk tasks, tour guidance, or retail checkouts.
- Healthcare Support: Assisting patients with mobility, monitoring, or even companionship.
- Disaster Response: Navigating hazardous or collapsed areas where human presence is risky.
To function effectively in these roles, humanoid robots require precise, responsive, and compact motor control systems—especially at the joints. Motors must be light, high-torque, and easily integrated into small volumes. This makes GaN-based inverters like the EPC91118 an enabling technology.
EPC9118: A Complete Motion Control System on a 32 mm Board
At the heart of the EPC91118 is the EPC23104 ePower™ Stage IC—a 100 V GaN monolithic device with integrated gate driver and level-shift circuitry. Three of these ICs form a high-efficiency 3-phase inverter capable of delivering:
- Up to 15 ARMS pulsed current per phase (10 ARMS continuous)
- 100 kHz PWM frequency with 50 ns deadtime
- 15–55 V input range
The EPC91118 integrates all critical motor control functions onto a single circular PCB that fits inside a 32 mm diameter joint housing:
- Rotor shaft magnetic encoder with 1024 pulse resolution and SPI support
- Current sensing on two phases using 44 mV/A Hall-effect sensors with overcurrent detection
- Voltage sensing with 44.89 mV/V gain
- STM32G431 microcontroller
- RS485 communication interface
- 5 V and 3.3 V power rails
- All-MLCC DC link capacitance (no electrolytic capacitors)
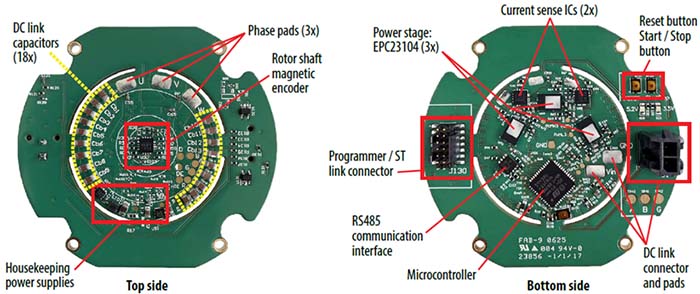 Figure 1: Top and bottom views of EPC91118
Figure 1: Top and bottom views of EPC91118
Why GaN ICs Matter in Robotics
Traditional silicon MOSFET-based inverters for robotic joints require large switching deadtimes, bulky electrolytic capacitors, and discrete driver circuits. This limits miniaturization, especially when trying to place electronics inside tight mechanical volumes such as knees, wrists, or ankles.
The EPC91118 solves these challenges:
- Monolithic GaN integration reduces component count, improves layout, and shrinks form factor
- High switching frequency (100 kHz) allows the use of MLCCs instead of electrolytics, reducing board thickness
- Low RDS(on) (8.7 mΩ typ) and fast switching reduce losses, improving thermal performance and torque per watt
Compared to an equivalent silicon solution, the EPC91118 achieves:
- 66% smaller inverter footprint
- Zero electrolytic capacitors
- Higher motor control bandwidth
Engineered for Humanoids (and Drones)
This reference design is optimized for motors found in humanoid joints and small UAV propulsion systems, where compact, lightweight, and reliable power electronics are essential. The shape and layout were specifically designed for integration into a humanoid robot, with adaptable mounting options for similar platforms.
The RS485 interface ensures compatibility with typical robot communication buses, while the JTAG connector supports real-time firmware debugging and GUI-based motor control setup.
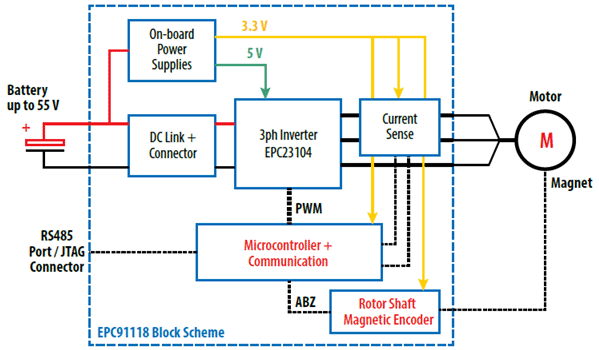 Figure 2: Block diagram overview of the EPC91118 evaluation board
Figure 2: Block diagram overview of the EPC91118 evaluation board
Evaluation and Getting Started
The EPC91118 comes pre-programmed to operate a typical joint motor at 50 rpm, with easily reconfigurable firmware via JTAG or RS485. System-level efficiency testing shows robust performance across varying speeds and torques, validating its use in dynamic robotic environments.
As experimental evaluation, the EPC91118 board was tested on a dynamometric bench in various load torque and rotor speed conditions. The inverter was operated at a 100 kHz PWM, 50 ns deadtime.
The total system efficiency from the DC electrical input to the output mechanical power vs. the load torque is shown below at rotor speed ranging from 50 rpm to 150 rpm. The system efficiency hence includes the inverter efficiency and the motor efficiency.
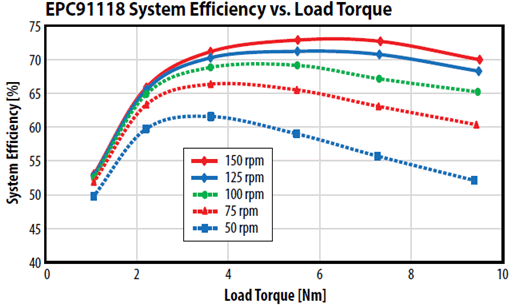 Figure 3: System efficiency vs. load torque at various rotor speeds
Figure 3: System efficiency vs. load torque at various rotor speeds
Conclusion
The EPC91118 is more than a motor drive—it’s a platform for embedded motion control where size, efficiency, and integration matter most. Powered by GaN, it gives robotic designers the tools to push the limits of mechatronics and mobility in next-generation humanoids and autonomous machines.
Technical Support & Resources
- Ask a GaN Expert
Need help integrating GaN into your next motor drive? Our experts are ready to assist.
Ask a GaN Expert
- Get it Right the First Time
Visit our GaN First Time Right page for layout tips, design checklists, and troubleshooting guides.
Go to GaN First Time Right
- Download the EPC91118 Quick Start Guide
Access schematics, layout files, and performance benchmarks.
View EPC91118 Resources
Tags: