eGaN FETs and ICs Bring Precision Control to Surgical Robots
GaN Talk – Michael de Rooij, Ph.D.
Nov 14, 2018
Minimal invasive surgery using surgical robots gives unprecedented control to surgeons looking to achieve the next level of precision, thereby reducing risk and trauma to the patient and speeding recovery. Many motors are required to control the various robotic appendages, such as arms, joints, and tool control, that give the surgical robot the required degrees of freedom (DOF) and dexterity to perform extremely delicate tasks. Weight and size of motor control circuitry are thus important factors in the design of such robots as they directly impact the size of the motor that manipulates the robot’s appendages during surgery.
The motor of choice for robotic surgery is the 3-phase brushless DC (BLDC) motor These motors are compact for their power rating, can be precisely controlled, offer high electro-mechanical efficiency, and can operate with minimal vibration when properly controlled. The choice of motor voltage lies in the range of 24 V to 48 V with balancing power conductor thickness and weight with insulation thickness and stiffness for optimum performance and dexterity being the determining factors.
These motors are driven by inverter circuits, which in most cases are 3-phase, that traditionally use MOSFETs. With the advent of eGaN FETs that switch much faster than MOSFETs, it is now possible to design the inverter to operate at much higher frequencies, which can provide higher electrical efficiency.
Being able to run at higher operating frequencies has many benefits including, but not limited to, increased control bandwidth for the motor. This increases the precision at which the motor can be controlled. In addition, the higher frequency reduces or even eliminates, mechanical vibration which is crucial to being able to take advantage of the higher control precision.
 Source: Globalsources.com
Source: Globalsources.com
Brushless DC (BLDC) motor
To prevent heating the motor when operating at higher frequencies, a compact filter can be added that adds negligible losses to the system. This combination still yields superior electro-mechanical efficiency and performance over a system designed using MOSFETs and, furthermore, ensures lower EMI generation making it easier to comply with regulatory standards.
The motor size and power rating will vary depending on the location and assigned task, for example, higher power motors are needed to manipulate an arm and low power motors are needed for operating a small precision tool. Thus, the power rating of the motor directly affects the power rating of the inverter drive powering the motor.
eGaN FETs for surgical robots’ motor drives
A typical inverter is comprised of three halfbridges with each output connected to a phase of the motor, as shown in figure 3. Ideally, the FETs are switched using the PWM technique and sinusoidally modulated to minimize vibration. Due to weight and size constraints, no heatsinks should be used to cool the FETs of the inverter.
Given that the motor voltage ratings lie between 24 V and 48 V, eGaN FET VDS ratings can be selected in the range 40 V and 100 V. Depending on the power requirements, continuous current ratings as low as 1 A to as high as 60 A can be encountered. Regardless of current or voltage rating, the basic drive topology and operation remains the same.
eGaN FETs are ideally suited for use in surgical robot motor drives since their superior hard-switching Figure of Merit (FOM) is three to four times lower than MOSFETs in the voltage range 40 V to 100 V. This allows eGaN FET-based drives to operate at higher efficiency and at a higher frequency and therefore with higher precision.
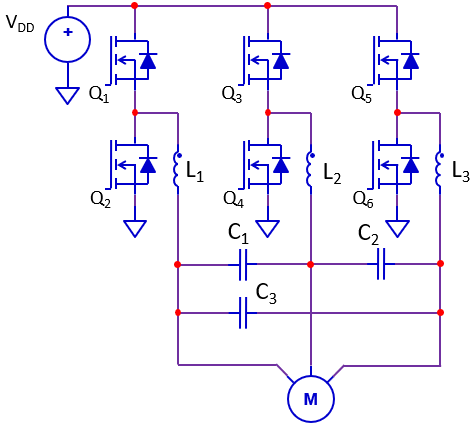
Figure 3: Typical 3-phase Motor drive with filter
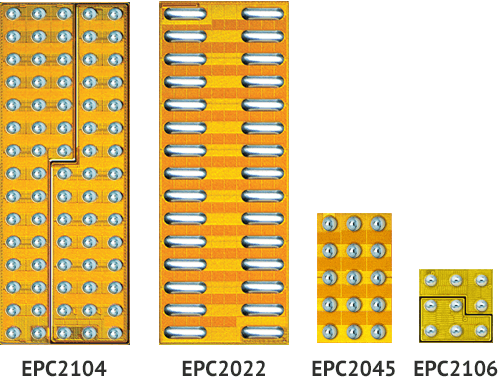
Figure 4: eGaN FETs suitable for surgical robot motor
The motor drive can be implemented based on a large selection of discrete eGaN FET options, as shown in table 1, where the motor power rating determines the FET current rating. One benefit of eGaN FETs over MOSFETs is the reduced area for the active devices, which includes the monolithic integration of the power stage. This feature is particularly useful for the very small motors that manipulate the tools. A selection of monolithically integrated eGaN FETs is given in table 2.
For each eGaN FET, a half-bridge development kit can be purchased. These development kits can be used to quickly assemble a motor drive to be used for performance evaluation.
eGaN FETs have a proven track record of reliability, which is supported with the inclusion of AEC qualified parts.
Table 1: Discrete eGaN FETs for surgical motor drives
Table 2: Monolithically integrated eGaN FETs for surgical motor drives
Summary
BLDC motors are the best choice for surgical robots due to their small size to power ratio. eGaN FETs are ideal devices for sinusoidally modulated motor drives given their higher efficiency and higher operating frequency. eGaN FETs used in the motor control circuit yield higher precision and results in a more compact drive for the motors. This combination allows designers to design surgical robots that are more compact and with superior dexterity over MOSFET equivalent solutions.