Compact 3-Phase GaN Inverter Board Optimized for Humanoid Robot Joints
GaN Talk – Federico Unnia
Nov 20, 2025
Embedded Power for a New Era of Robotics
As humanoid robots evolve to replicate human movement with precision and agility, engineers face an increasing demand for compact, efficient, and responsive motor drives. The EPC91120 reference design demonstrates how GaN integration enables inverter electronics to be embedded directly inside robotic joints—reducing weight, improving efficiency, and enhancing motion control.
Design Overview: High-Power Density in a 32 mm Inverter
The EPC91120 is a 3-phase BLDC motor drive inverter featuring three EPC23102 ePower™ Stage ICs—monolithic GaN half-bridge devices with 5.2 mΩ RDS(on) and 100 V capability. The inverter delivers up to 21 A peak (15 ARMS steady-state) and 42 A peak (30 ARMS pulsed) while operating from 15 V to 65 V DC. Block diagram shown in figure 1.
A fully integrated control stage includes:
- Microcontroller (STM32G431CBU6) with JTAG programming and RS485 communication
- On-board housekeeping supplies (5 V and 3.3 V)
- Current and voltage sensing circuits for precise control
- 1024-pulse magnetic encoder with SPI interface for rotor position feedback
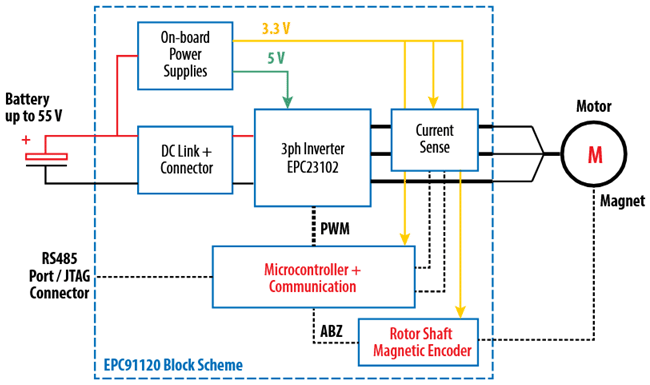 Figure 1: Block diagram overview of the EPC91120 evaluation board
Figure 1: Block diagram overview of the EPC91120 evaluation board
Mechanical Integration: Designed for Robotic Joints
The EPC91120 fits entirely within a 32 mm diameter inner circle and is mounted inside a 55 mm mechanical frame for integration into humanoid robot joints, such as the Unitree A1 motor. (shown in figure 2)
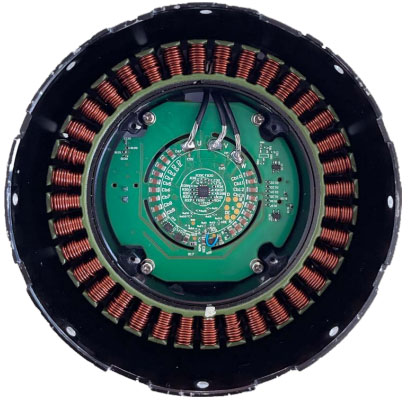 Figure 2: EPC91120 mounted inside robotic motor
Figure 2: EPC91120 mounted inside robotic motor
This form factor allows the inverter to sit directly in the stator housing, using the motor casing as a heatsink to improve thermal performance.
The board operates at a 100 kHz PWM frequency with only 50 ns dead time, supporting smooth torque control and reduced acoustic noise—ideal for humanoid limbs and other precision motion systems.
Performance Validation: Efficiency Meets Agility
Thermal Performance
When tested at 48 V DC and 100 kHz PWM, the EPC91120 maintained:
- 7 ARMS per phase under natural convection (no heatsink)
- 15 ARMS per phase when the motor casing served as the heatsink
Temperature rise remained below 40 °C from case to ambient, confirming excellent thermal behavior for compact joint integration.
Pulsed Torque Efficiency
Dynamic load tests performed at 24 V DC and 100 kHz PWM demonstrated:
- System efficiencies exceeding 80%, measured from DC input to mechanical output
- Up to 26.5 N·m torque at 92 rpm rotor speed
- Peak currents of 30 ARMS during torque impulses
These results validate the design as a reliable, high-performance inverter solution for humanoid joints and lightweight robotic limbs.
Applications Beyond Humanoids
While optimized for humanoid robot joints, the EPC91120 architecture is also well suited for:
- UAV propulsion systems
- Collaborative robot (cobot) actuators
- High-torque exoskeletons
- Compact servo drives for automation
GaN’s high efficiency and small footprint enable next-generation designs where every gram and milliwatt counts.
Technical Support & Resources
- Ask a GaN Expert
Need help integrating GaN into your next motor drive? Our experts are ready to assist.
Ask a GaN Expert
- Get it Right the First Time
Visit our GaN First Time Right page for layout tips, design checklists, and troubleshooting guides.
Go to GaN First Time Right
- Download the EPC91120 Quick Start Guide
Access schematics, layout files, and performance benchmarks.
View EPC91120 Resources